HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
Fan Lu, Guang Chen*, Yinlong Liu, Lijun Zhang, Sanqing Qu, Shu Liu, Rongqi Gu
International Conference on Computer Vision (ICCV), 2021
[Paper]
[Code]
[Arxiv]
[Supplementary material]
Abstract
Point cloud registration is a fundamental problem in 3D computer vision.
Outdoor LiDAR point clouds are typically large-scale and complexly distributed, which makes the registration challenging.
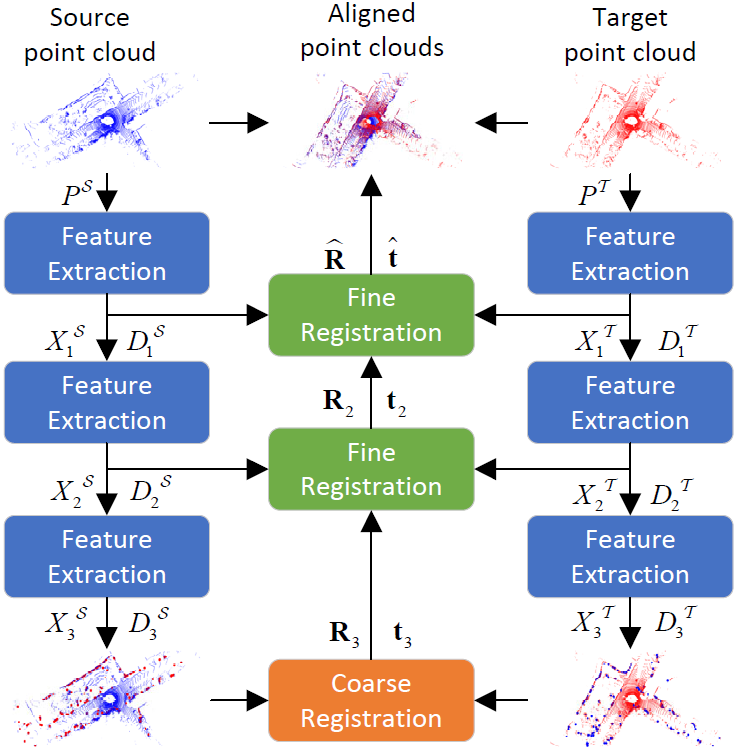
In this paper, we propose an efficient hierarchical network named HRegNet for large-scale outdoor LiDAR point cloud registration.
Instead of using all points in the point clouds, HRegNet performs registration on hierarchically extracted keypoints and descriptors.
The overall framework combines the reliable features in deeper layer and the precise position information in shallower layers
to achieve robust and precise registration. We present a correspondence network to generate correct and accurate keypoints correspondences.
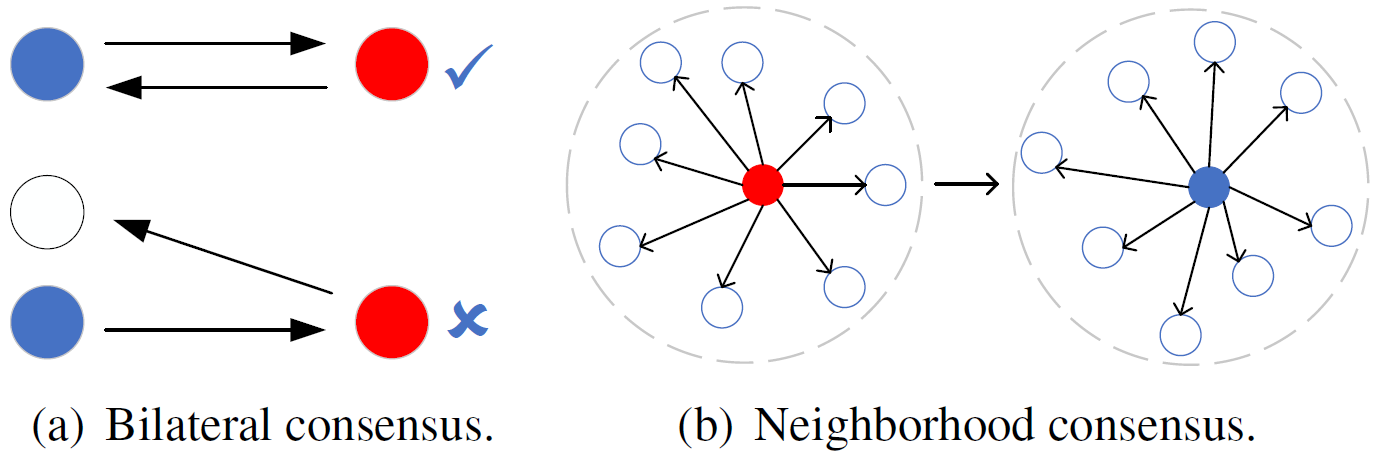
Moreover, bilateral consensus and neighborhood consensus are introduced for keypoints matching
and novel similarity features are designed to incorporate them into the correspondence network,
which significantly improves the registration performance.
Besides, the whole network is also highly efficient since only a small number of keypoints are used for registration.
Extensive experiments are conducted on two large-scale outdoor LiDAR point cloud datasets to demonstrate
the high accuracy and efficiency of the proposed HRegNet.
Network architecture
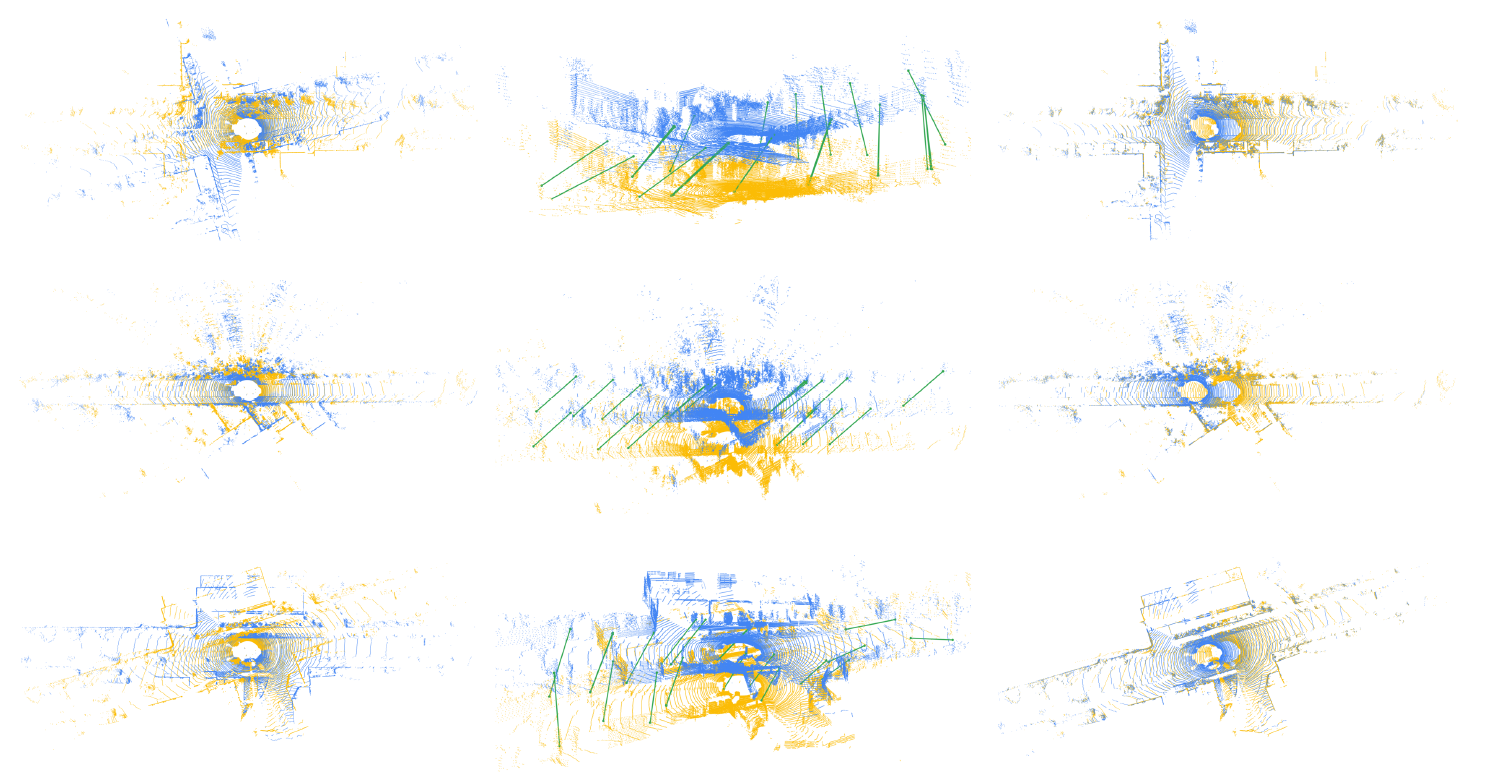
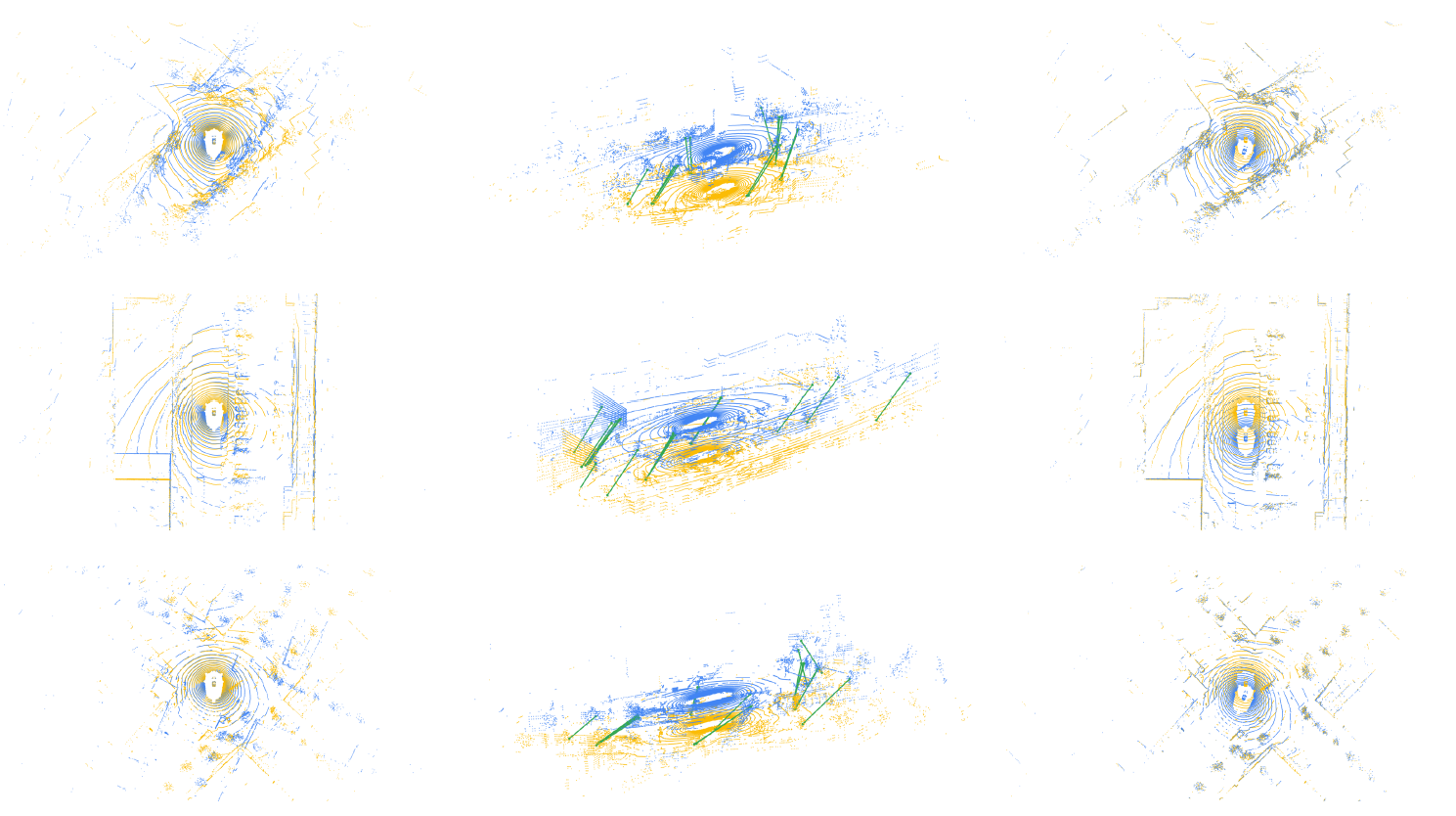
Qualitative results
We provide several qualitative visualization results below.
KITTI odometry dataset
NuScenes dataset
Citation
@InProceedings{Lu_2021_ICCV,
author = {Lu, Fan and Chen, Guang and Liu, Yinlong and Zhang Lijun, Qu Sanqing, Liu Shu, Gu Rongqi},
title = {HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision},
year = {2021}
}