VCANet: Vanishing‑Point‑Guided Context‑Aware Network for Small Road Object Detection
Guang Chen, Kai Chen, Lijun Zhang, Liming Zhang, Alois Knoll
Automotive Innovation, 2021
[Paper]
Abstract
Advanced deep learning technology has made great progress in generic object detection of autonomous driving, yet it is still
challenging to detect small road hazards in a long distance owing to lack of large-scale small-object datasets and dedicated
methods. This work addresses the challenge from two aspects. Firstly, a self-collected long-distance road object dataset (TJ-LDRO) is introduced, which consists of 109,337 images and is the largest dataset so far for the small road object detection
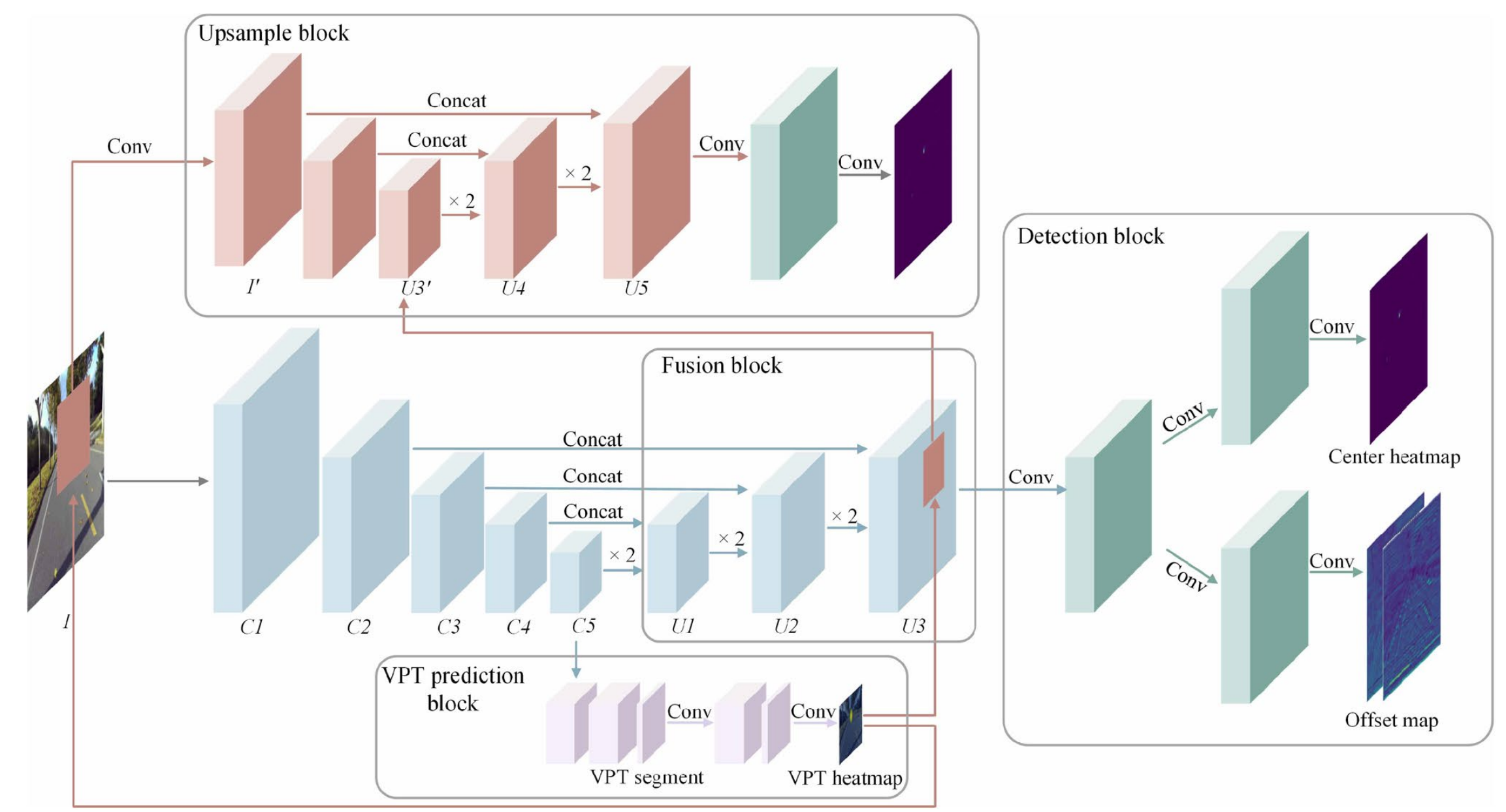
research. Secondly, a vanishing-point-guided context-aware network (VCANet) is proposed, which utilizes the vanishing
point prediction block and the context-aware center detection block to obtain semantic information. The multi-scale feature
fusion pipeline and the upsampling block in VCANet are introduced to enhance the region of interest (ROI) feature. The
experimental results with TJ-LDRO dataset show that the proposed method achieves better performance than the representative generic object detection methods. This work flls a critical capability gap in small road hazards detection for high-speed
autonomous vehicles.
Network architecture
TJ-LDRO dataset
You can get our data at Baiduyun Cloud [Download TJ-LDRO], Keywords: v7xm
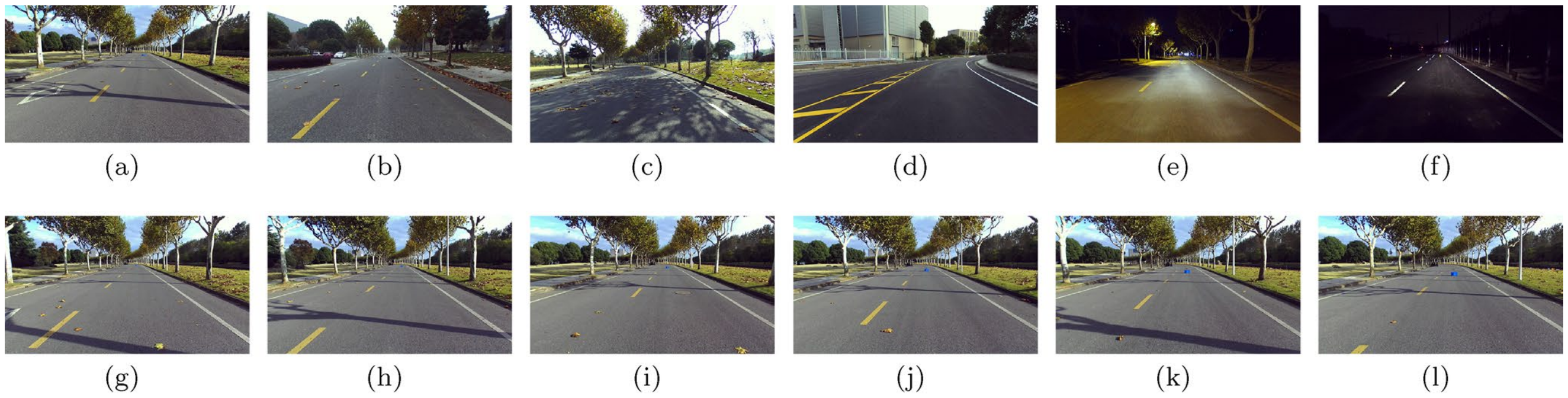
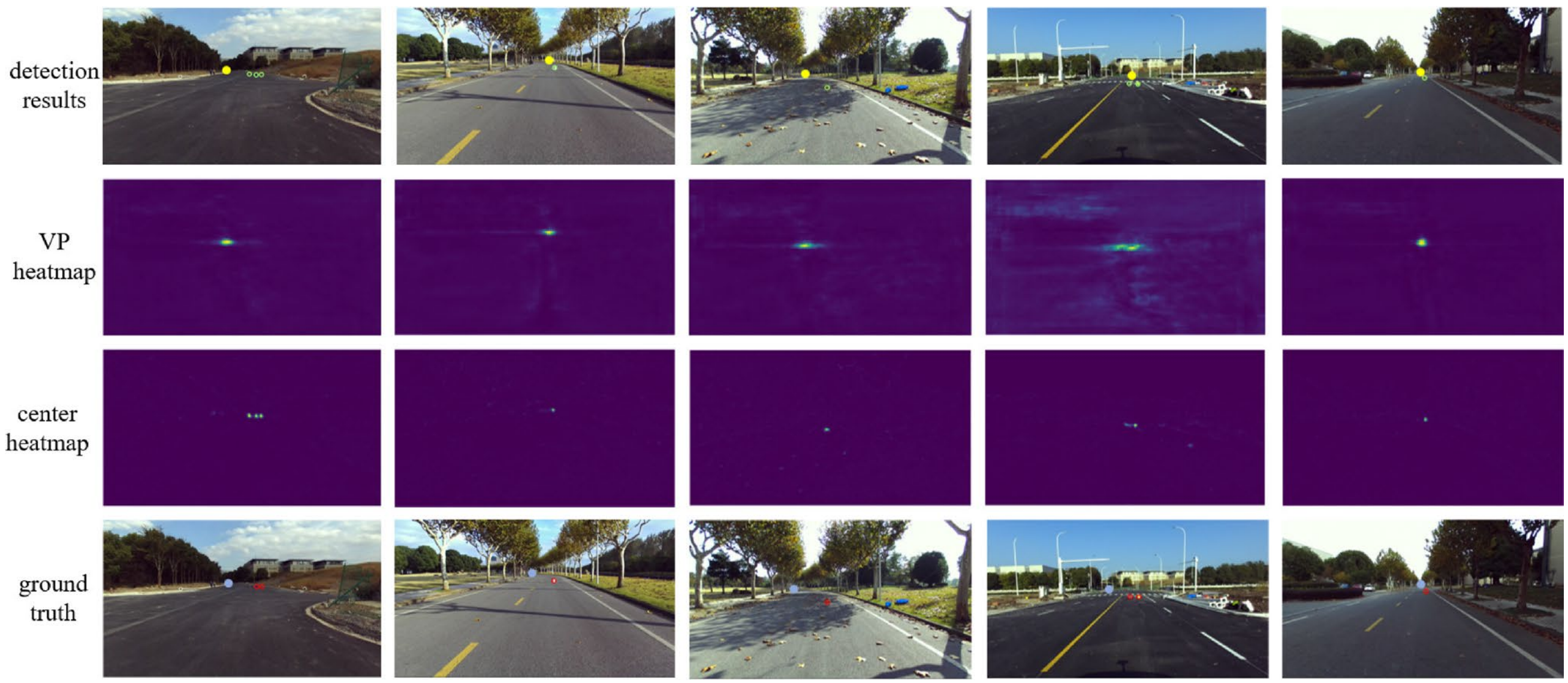
Qualitative results
Citation
@article{chen2021vcanet,
title={VCANet: Vanishing-Point-Guided Context-Aware Network for Small Road Object Detection},
author={Chen, Guang and Chen, Kai and Zhang, Lijun and Zhang, Liming and Knoll, Alois},
journal={Automotive Innovation},
pages={1--13},
year={2021},
publisher={Springer}
}